雷達車輛偵測器
雷達車輛偵測器用於停車場的車輛防砸、空車位計數及車道間行車安全應用,其相對目前市面所使用的地感+車輛偵測器的方式具有革命性的進步,雷達車輛偵測器具有可調整檢測距離、寬度及行車方向的功能讓感應更精確,直觀式運作狀態顯示讓維護上更即時,螺母固定方式拆卸非常簡易;完美解決地感安裝時因需開鑿地面所產生費時、費錢、影響車輛進出、不易維修、接線複雜及無法感應高底盤的大車及行人等痛點。
概述
在傳統的閘道口車輛和行人檢測解決方案中,通常用使用地感及紅外檢測器;但這兩個方案在實際運作上存在諸多嚴重問題,以下是歸納問題的總結。

地感檢測器使用上的問題
- 安裝過程中切割和修復路面的成本高。
- 維護成本高,因為地感線圈大約需要每兩年更換一次。
- 設備損壞無法即時得知。
- 只能感應小車,高底盤的大車無法同時感應,無法檢測機車、腳踏車及行人。
- 很多場景不適合安裝地感;如:位於高電流電纜、光纖、水管和天然氣管道的上方路面。

紅外感應器使用上的問題
- 安裝位置較易受限,紅外感應器必須成對安裝在入口兩側。
- 適應性較差、誤報率高、易受干擾,如光源、落葉等因素。
GoRad-79G雷達車輛偵測器所使用的檢測方式完全解決上述兩個方案的痛點
採用與自動跟車系統相同的偵測雷達,可精準檢測轎車、大車、機車、腳踏車、行人並保護其免受 閘欄撞擊;除了精準檢測外,IP66 防水性、耐嚴寒酷熱氣候、安裝簡單、維護容易等令人印象深刻的卓越展現。
主要特點
基於雷達車輛偵測器與傳統地感線圈檢測的車輛計數系統相較,使用雷達車輛偵測方式更具有許多令人驚豔的優點:
![]()
採用LED 燈指示雷達工作狀態,直觀式觀看設備運行狀態,無須開啟箱體查看。
![]()
採用與自動跟車系統相同的79GHz MMIC 雷達波感應技術及IP66 防水外殼,不受不受電磁干擾、光照、灰塵、暴雨和大雪的天候環境影響。
![]()
單體安裝不受環境限制。直接架設無需割地埋線圈及回填,施工與維護更簡單、更即時;同時可保持車道地面的美觀。
![]()
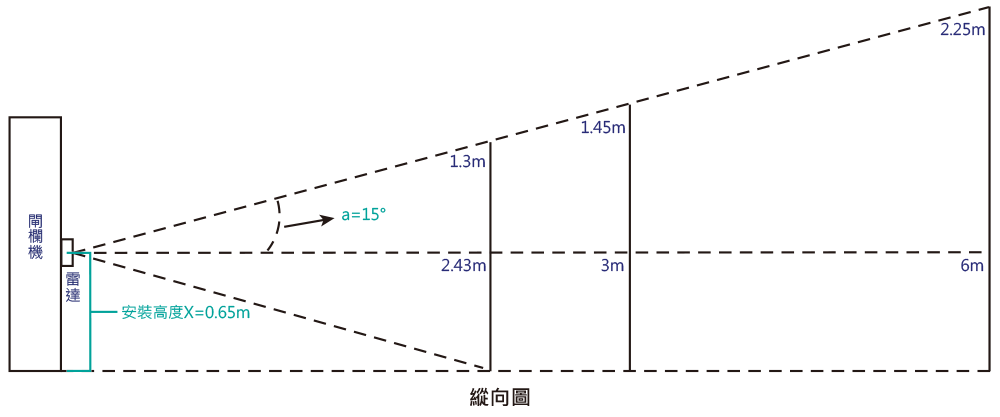
可因地制宜設定檢測的車道寬度 (±1.5 米)、距離(1-6 米) 及高度(2.25 米),適用於不同寬度的車道及車種通行環境。
![]()
可透過軟體設定不同的車輛進出的檢測方式,以符合不同停車場的應用環境。
![]()
具有人車區分設定功能,可精確檢測小車、大貨車、機車、腳踏車及行人,除了防砸車也可以防砸人。
![]()
具有檢測行車方向的功能。
![]()
相對於地感線圈,雷達波感測器壽命更長可達五年以上。
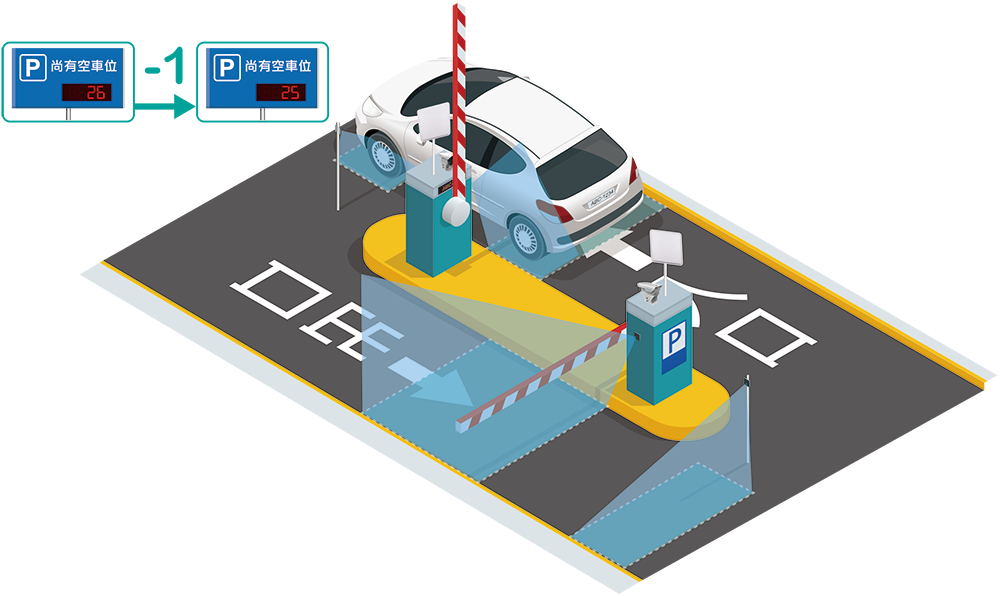
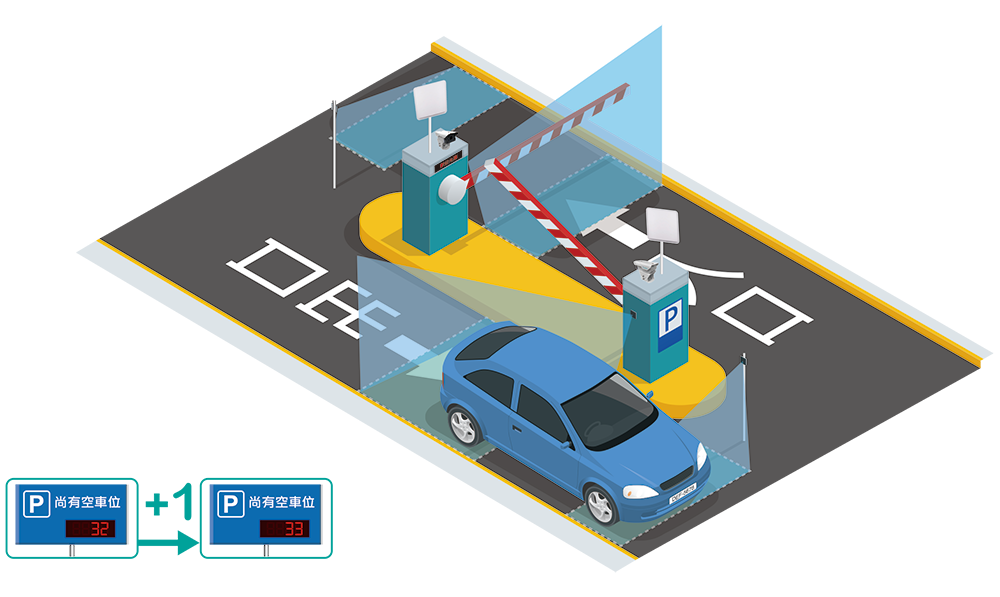
ParkCount® 停車場車位自動計數應用
統計停車場空車位數解決方案。
此解決方案提供更快速的安裝方式、更簡便的維修方法、更精確的車輛計數邏輯,且施工期間完全不影響車輛進出;系統運作說明如下:
① 在閘門出、入口處安裝車牌攝影機或UHF讀取機用於車輛辨識進行車輛管制進出。
② 於柵欄機側邊安裝雷達車輛偵測器,並將觸發訊號連接到網路I/O控制器。
③ 當辨識到車牌且觸發雷達車輛偵測器訊號時,才可確認該車進入(離開)停車場,停車管理主機依此精確統計進場(離場)車輛。
④ 主機將總空車位數與偵測到的進場(離場)車輛數進行扣除(增加)統計後的數量即時顯示於閘道口的字幕機。
ParkSafe® 樓層間車道行車安全系統
獨立型樓層間車道行車安全解決方案。
利用雷達車輛偵測器+可程式時程控制器進行車道間的燈號控管以維護車道行車安全,系統運作方式說明如下:
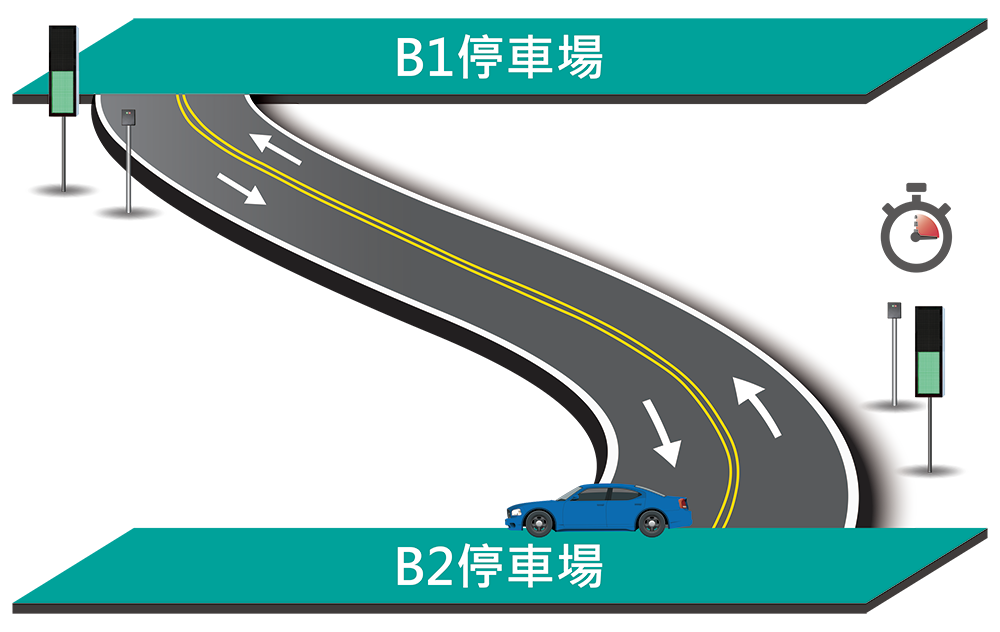
① 當車輛以特定方向經過雷達檢測區時,將可程式時程控制器開啟紅燈(蜂鳴閃光燈)並開始計時。
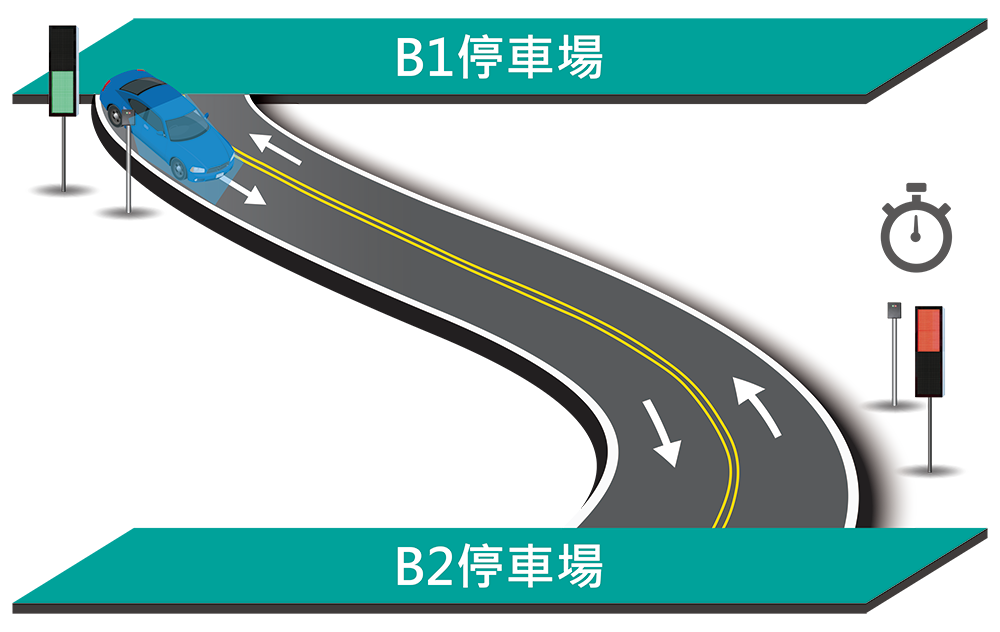
② 當到達計時時間後自動關閉紅燈(蜂鳴閃光燈)同時開啟綠燈。
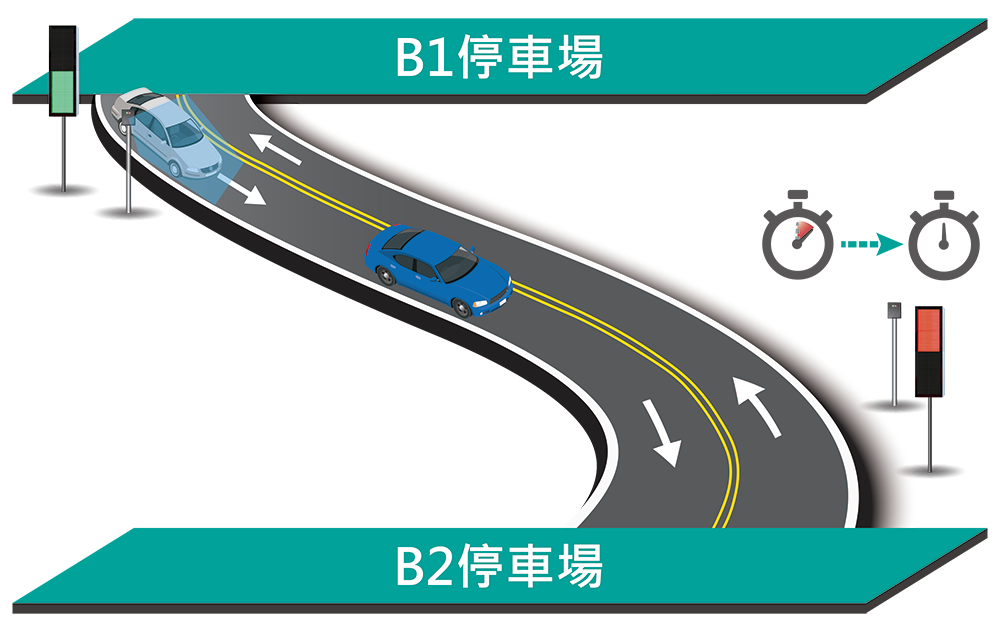
③ 計時期間若有相同行進方向的車輛通過檢測區時,控制器將重置計時,待到達時間後自動關閉紅燈並開啟綠燈。
④ 每一樓層間的車道行車安全系統皆為獨立運作互不隸屬,如此確保不因控制主機當機而影響全部樓層。
時程管控樓層間車道行車安全解決方案。
大公司在下班期間每一樓層同時都有大量的車輛等待離開,若不進行各樓層出車時間管控,容易造成某些樓層的車輛長時間等待無法離開的窘境,為了徹底解決尖峰時間車輛出車的公平性,天鄰科技的車道時程管控系統為這個問題提供了最佳的解決方案。
① 在停車管理主機設定樓層間車輛離開管控時程;例:週一~週五5:00PM啟動控管時程,每樓層開放50秒通行時間。
② 當該樓層開放通行時顯示綠燈;其他樓層顯示紅燈及剩餘秒數。(顯示剩餘秒數可降低等待焦慮感)。

③ 當該樓層通行時間結束時切換燈號為紅燈並剩餘秒數;同時開啟另一樓層通行時間並切換燈號為綠燈。

④ 每個樓層依設定時序開啟通行時間,並循環運作直到管控時程結束。
| 型號 | GoRad-79G-P(防砸車感應雷達) | GoRad-79G-T(觸發感應雷達GoRad-79G) |
| 工作頻率 | 79-81GHz |
| 檢測距離 | 車道寬度(1-6公尺)、車輛高度(2.25公尺)、左右長度(0.3~±1.5公尺),檢測距離可透過軟體調整。 |
| 偵測速度 | <0.5s |
| 輸出模式 | 常開x1 |
| 指示燈 | 紅燈:電源 | 綠燈:檢測到物件 |
| 通訊方式 | RS-485,藍芽 |
| 防水等級 | IP66 |
| 發射罩材質 | ABS |
| 散熱方式 | 自然對流導熱 |
| 工作環境 | -40℃〜85℃ | 濕度10%〜90%(無凝結) |
| 電源 | 12~24VDC輸入; <2.5W |
| 尺寸 |重量 | 108x 74x 17mm | 0.3公斤 |
| 認證 | CE | FCC | IP66 |
| * 規格如有更改,恕不另行通知。 | |
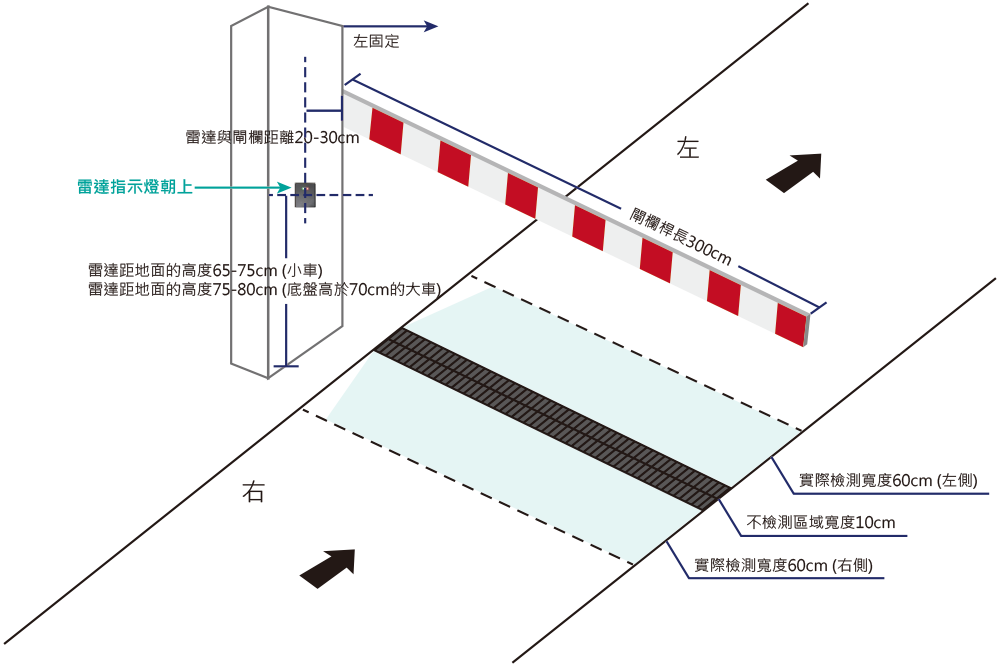
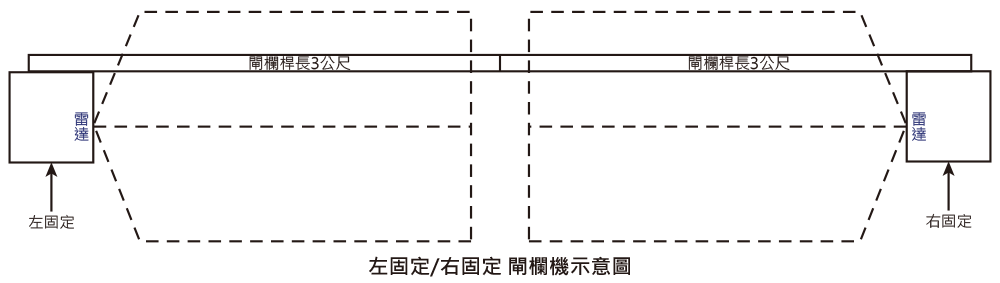
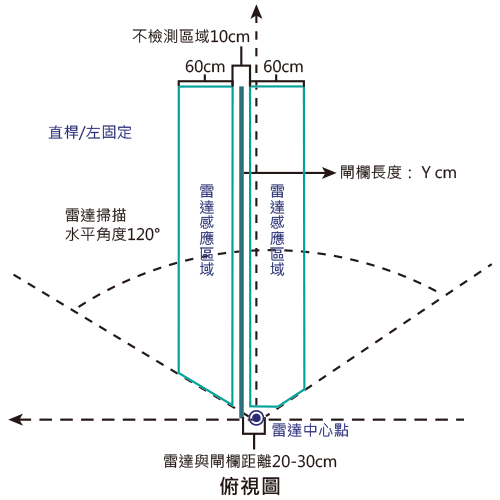
安裝位置示意圖
檢測範圍示意圖
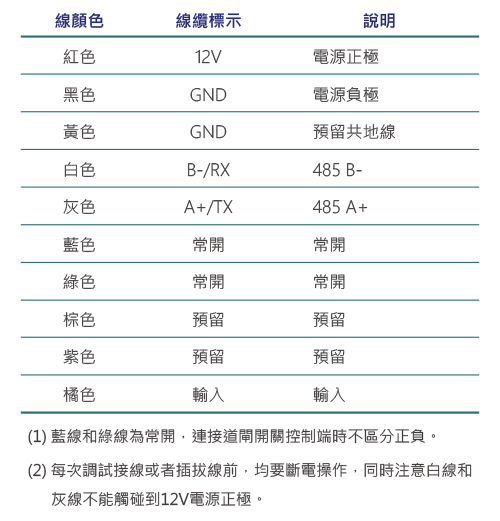
接口說明
NetCom I/O控制器系列具有多種DI/DO/AI的輸出、輸入組合,控制器負責收集GoRad-79G感應雷達檢測到物件的觸發訊號,以ModBus通訊協議透過乙太網路傳送到停車管理主機,系統藉由車牌辨識及雷達偵測結果執行增減空車位數量,必要時亦可透過控制器觸發報警閃光燈。
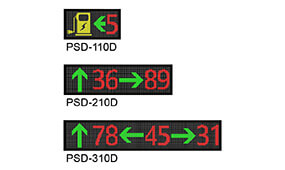
| NC-xxyyLAN | PSD-110 | AFL-xxxyy |
| NetCom I/O控制器 | 車道行車紅綠燈 | 報警閃光燈 |
|
|
|
| 控制器系列具有多種DI/DO/AI的輸出、入組合,產品詳細規格請參考Netcom_IO產品型錄 訂購資訊: NC-xxyyLAN;xx=DI數量;yy=DO數量 例:NC-1208LAN;表示12路DI,8路DO,網路通訊界面 | 燈號:LED;單顆亮度2500~4000(紅燈) | 4000~5600(綠燈) 波長:630±5nm波長(紅燈) | 505±5nm(綠燈) 視角:左/右/上/下各約30° 功率:≤10W。 環境溫度:-30℃~+70℃ 工作電壓:AC110V-220V 外殼材料:鋁合金+PC(室內型) | 鋼鐵合金+鋼化玻璃(室外型) 尺寸(mm)/ 重量:355x 202 x 90 mm/ 1.1 Kg (室內型) | 344x 192 x 85 mm/ 3.5 Kg (室外型) IP等級:IP54 (室內型) | IP66 (室外型) 可視距離:≥50 公尺 訂購資訊: PSD-110x yyy;x= D (室內型) | K (室外型);yyy=LAN (網路介面) | 無 (485介面) 例:PSD-110D ; 表示為室內型485介面紅綠燈 | 光源功率:2W 光源顏色:紅色 聲音功率:100dB 工作電壓:AC110V/ AC220V/ DC12V/ DC24V(可選) 外殼材質:ABS材質 尺寸:Ø164x 220 mm 訂購資訊: ALF-xxxyy;xxx=輸入電壓;yy=DC或AC電源 例:ALF-110AC表示110V交流電輸入 |


| 說明 | 版本 | 發佈日期 | 容量 | 下載 | 備註 | |
| ParkHelp® 車位在席停車管理主機_雙檢測 | V2.1 | 2023/04/19 | 0.92M | ||
| ParkDB® 中央管理伺服器 | V2.1 | 2023/04/19 | 0.81M | |||
| ParkBack® 停車管理備援主機 | V2.1 | 2023/04/19 | 0.65M | |||
| ParkCam® 車位偵測攝影機 | V2.1 | 2023/04/12 | 0.95M | |||
| ParkSen® 超音波車位檢測器 | V2.1 | 2023/04/18 | 1.59M | |||
| ParkSen® 超音波車位檢測控制器 | V2.1 | 2023/04/18 | 0.88M | |||
| AutoPay® 全自動繳費機 | V2.1 | 2023/04/14 | 0.85M | |||
| CarFinder® 反向尋車主機 | V2.1 | 2023/04/12 | 0.5M | |||
| ParkGate® 閘欄機 | V2.0 | 2022/02/21 | 0.7M | |||
| ParkGate® 車位閘欄機 | V2.1 | 2024/04/02 | 0.39M | |||
| ParkDis® 停車位引導字幕機_室內 | V2.1 | 2023/04/18 | 0.97M | |||
| ParkDis® 停車位引導字幕機_戶外 | V2.1 | 2023/04/18 | 1.3M | |||
| ParkCount® 防砸車及車位計數專用雷達波檢測器 | V2.1 | 2023/04/18 | 0.81M | |||
| GoSmart® 整合式智慧型立柱 | V2.1 | 2023/05/29 | 1M | |||
| UHF讀取機 | V2.1 | 2023/04/18 | 0.43M | |||
| NetCom® 網路I/O控制器 | V2.1 | 2023/04/14 | 1.99M | |||
| ParkTalk® 網路對講機 | V2.1 | 2022/02/21 | 0.9M | |||
| ParkLit® 補光燈 | V2.1 | 2022/02/21 | 0.8M | |||
| ParkGuid® 車位在席停車引導系統簡報資料 | V2.0 | 2022/03/01 | 23M | |||
| AnyCam® 紅外防護罩網路攝影機 | V2.1 | 2023/04/12 | 0.45M | |||
| ParkGuide® 停車管理及停車導引系統簡報 | V2.1 | 2023/04/12 | 0.45M | |||
| ParkHelper® Parking Space Management Server operation manual | V1.1 | 2022/02/21 | 5.8M | ||
| CarFinder® Find My Car Server operation manual | V1.1 | 2022/02/21 | 3.9M | |||
| ParkGate® 直流無刷閘欄機操作手冊 | V1.1 | 2022/08/28 | 1.6M | |||
| ParkHelper® 停車管理主機軟體 | V1.2 | 2022/02/26 | 260M | ||
| CarFinder® 停車置搜尋主機軟體 | V1.3 | 2022/02/26 | 36.8M | |||
| ezParkTag® 免主機UHF讀取機設定軟體 | V1.3 | 2022/02/26 | 0.6M |


相關產品